目錄
- A* 算法簡介
- 關鍵代碼介紹
- 保存基本信息的地圖類
- 搜索到的節點類
- 算法主函數介紹
- 代碼的初始化
- 完整代碼
A* 算法簡介
A* 算法需要維護兩個數據結構:OPEN 集和 CLOSED 集。OPEN 集包含所有已搜索到的待檢測節點。初始狀態,OPEN集僅包含一個元素:開始節點。CLOSED集包含已檢測的節點。初始狀態,CLOSED集為空。每個節點還包含一個指向父節點的指針,以確定追蹤關系。
A* 算法會給每個搜索到的節點計算一個G+H 的和值F:
- F = G + H
- G:是從開始節點到當前節點的移動量。假設開始節點到相鄰節點的移動量為1,該值會隨著離開始點越來越遠而增大。
- H:是從當前節點到目標節點的移動量估算值。
- 如果允許向4鄰域的移動,使用曼哈頓距離。
- 如果允許向8鄰域的移動,使用對角線距離。
算法有一個主循環,重復下面步驟直到到達目標節點:
1 每次從OPEN集中取一個最優節點n(即F值最小的節點)來檢測。
2 將節點n從OPEN集中移除,然后添加到CLOSED集中。
3 如果n是目標節點,那么算法結束。
4 否則嘗試添加節點n的所有鄰節點n'。
- 鄰節點在CLOSED集中,表示它已被檢測過,則無需再添加。
- 鄰節點在OPEN集中:
- 如果重新計算的G值比鄰節點保存的G值更小,則需要更新這個鄰節點的G值和F值,以及父節點;
- 否則不做操作
- 否則將該鄰節點加入OPEN集,設置其父節點為n,并設置它的G值和F值。
有一點需要注意,如果開始節點到目標節點實際是不連通的,即無法從開始節點移動到目標節點,那算法在第1步判斷獲取到的節點n為空,就會退出
關鍵代碼介紹
保存基本信息的地圖類
地圖類用于隨機生成一個供尋路算法工作的基礎地圖信息
先創建一個map類, 初始化參數設置地圖的長度和寬度,并設置保存地圖信息的二維數據map的值為0, 值為0表示能移動到該節點。
class Map():
def __init__(self, width, height):
self.width = width
self.height = height
self.map = [[0 for x in range(self.width)] for y in range(self.height)]
在map類中添加一個創建不能通過節點的函數,節點值為1表示不能移動到該節點。
def createBlock(self, block_num):
for i in range(block_num):
x, y = (randint(0, self.width-1), randint(0, self.height-1))
self.map[y][x] = 1
在map類中添加一個顯示地圖的函數,可以看到,這邊只是簡單的打印出所有節點的值,值為0或1的意思上面已經說明,在后面顯示尋路算法結果時,會使用到值2,表示一條從開始節點到目標節點的路徑。
def showMap(self):
print("+" * (3 * self.width + 2))
for row in self.map:
s = '+'
for entry in row:
s += ' ' + str(entry) + ' '
s += '+'
print(s)
print("+" * (3 * self.width + 2))
添加一個隨機獲取可移動節點的函數
def generatePos(self, rangeX, rangeY):
x, y = (randint(rangeX[0], rangeX[1]), randint(rangeY[0], rangeY[1]))
while self.map[y][x] == 1:
x, y = (randint(rangeX[0], rangeX[1]), randint(rangeY[0], rangeY[1]))
return (x , y)
搜索到的節點類
每一個搜索到將到添加到OPEN集的節點,都會創建一個下面的節點類,保存有entry的位置信息(x,y),計算得到的G值和F值,和該節點的父節點(pre_entry)。
class SearchEntry():
def __init__(self, x, y, g_cost, f_cost=0, pre_entry=None):
self.x = x
self.y = y
# cost move form start entry to this entry
self.g_cost = g_cost
self.f_cost = f_cost
self.pre_entry = pre_entry
def getPos(self):
return (self.x, self.y)
算法主函數介紹
下面就是上面算法主循環介紹的代碼實現,OPEN集和CLOSED集的數據結構使用了字典,在一般情況下,查找,添加和刪除節點的時間復雜度為O(1), 遍歷的時間復雜度為O(n), n為字典中對象數目。
def AStarSearch(map, source, dest):
...
openlist = {}
closedlist = {}
location = SearchEntry(source[0], source[1], 0.0)
dest = SearchEntry(dest[0], dest[1], 0.0)
openlist[source] = location
while True:
location = getFastPosition(openlist)
if location is None:
# not found valid path
print("can't find valid path")
break;
if location.x == dest.x and location.y == dest.y:
break
closedlist[location.getPos()] = location
openlist.pop(location.getPos())
addAdjacentPositions(map, location, dest, openlist, closedlist)
#mark the found path at the map
while location is not None:
map.map[location.y][location.x] = 2
location = location.pre_entry
我們按照算法主循環的實現來一個個講解用到的函數。
下面函數就是從OPEN集中獲取一個F值最小的節點,如果OPEN集會空,則返回None。
# find a least cost position in openlist, return None if openlist is empty
def getFastPosition(openlist):
fast = None
for entry in openlist.values():
if fast is None:
fast = entry
elif fast.f_cost > entry.f_cost:
fast = entry
return fast
addAdjacentPositions 函數對應算法主函數循環介紹中的嘗試添加節點n的所有鄰節點n'。
# add available adjacent positions
def addAdjacentPositions(map, location, dest, openlist, closedlist):
poslist = getPositions(map, location)
for pos in poslist:
# if position is already in closedlist, do nothing
if isInList(closedlist, pos) is None:
findEntry = isInList(openlist, pos)
h_cost = calHeuristic(pos, dest)
g_cost = location.g_cost + getMoveCost(location, pos)
if findEntry is None :
# if position is not in openlist, add it to openlist
openlist[pos] = SearchEntry(pos[0], pos[1], g_cost, g_cost+h_cost, location)
elif findEntry.g_cost > g_cost:
# if position is in openlist and cost is larger than current one,
# then update cost and previous position
findEntry.g_cost = g_cost
findEntry.f_cost = g_cost + h_cost
findEntry.pre_entry = location
getPositions 函數獲取到所有能夠移動的節點,這里提供了2種移動的方式:
- 允許上,下,左,右 4鄰域的移動
- 允許上,下,左,右,左上,右上,左下,右下 8鄰域的移動
def getNewPosition(map, locatioin, offset):
x,y = (location.x + offset[0], location.y + offset[1])
if x 0 or x >= map.width or y 0 or y >= map.height or map.map[y][x] == 1:
return None
return (x, y)
def getPositions(map, location):
# use four ways or eight ways to move
offsets = [(-1,0), (0, -1), (1, 0), (0, 1)]
#offsets = [(-1,0), (0, -1), (1, 0), (0, 1), (-1,-1), (1, -1), (-1, 1), (1, 1)]
poslist = []
for offset in offsets:
pos = getNewPosition(map, location, offset)
if pos is not None:
poslist.append(pos)
return poslist
isInList 函數判斷節點是否在OPEN集 或CLOSED集中
# check if the position is in list
def isInList(list, pos):
if pos in list:
return list[pos]
return None
calHeuristic 函數簡單得使用了曼哈頓距離,這個后續可以進行優化。
getMoveCost 函數根據是否是斜向移動來計算消耗(斜向就是2的開根號,約等于1.4)
# imporve the heuristic distance more precisely in future
def calHeuristic(pos, dest):
return abs(dest.x - pos[0]) + abs(dest.y - pos[1])
def getMoveCost(location, pos):
if location.x != pos[0] and location.y != pos[1]:
return 1.4
else:
return 1
代碼的初始化
可以調整地圖的長度,寬度和不可移動節點的數目。
可以調整開始節點和目標節點的取值范圍。
WIDTH = 10
HEIGHT = 10
BLOCK_NUM = 15
map = Map(WIDTH, HEIGHT)
map.createBlock(BLOCK_NUM)
map.showMap()
source = map.generatePos((0,WIDTH//3),(0,HEIGHT//3))
dest = map.generatePos((WIDTH//2,WIDTH-1),(HEIGHT//2,HEIGHT-1))
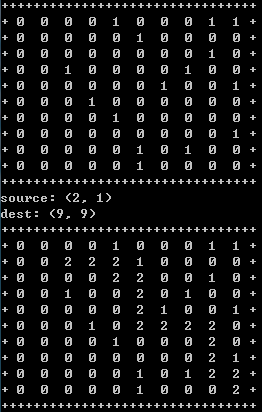
print("source:", source)
print("dest:", dest)
AStarSearch(map, source, dest)
map.showMap()
執行的效果圖如下,第一個表示隨機生成的地圖,值為1的節點表示不能移動到該節點。
第二個圖中值為2的節點表示找到的路徑。
完整代碼
使用python3.7編譯
from random import randint
class SearchEntry():
def __init__(self, x, y, g_cost, f_cost=0, pre_entry=None):
self.x = x
self.y = y
# cost move form start entry to this entry
self.g_cost = g_cost
self.f_cost = f_cost
self.pre_entry = pre_entry
def getPos(self):
return (self.x, self.y)
class Map():
def __init__(self, width, height):
self.width = width
self.height = height
self.map = [[0 for x in range(self.width)] for y in range(self.height)]
def createBlock(self, block_num):
for i in range(block_num):
x, y = (randint(0, self.width-1), randint(0, self.height-1))
self.map[y][x] = 1
def generatePos(self, rangeX, rangeY):
x, y = (randint(rangeX[0], rangeX[1]), randint(rangeY[0], rangeY[1]))
while self.map[y][x] == 1:
x, y = (randint(rangeX[0], rangeX[1]), randint(rangeY[0], rangeY[1]))
return (x , y)
def showMap(self):
print("+" * (3 * self.width + 2))
for row in self.map:
s = '+'
for entry in row:
s += ' ' + str(entry) + ' '
s += '+'
print(s)
print("+" * (3 * self.width + 2))
def AStarSearch(map, source, dest):
def getNewPosition(map, locatioin, offset):
x,y = (location.x + offset[0], location.y + offset[1])
if x 0 or x >= map.width or y 0 or y >= map.height or map.map[y][x] == 1:
return None
return (x, y)
def getPositions(map, location):
# use four ways or eight ways to move
offsets = [(-1,0), (0, -1), (1, 0), (0, 1)]
#offsets = [(-1,0), (0, -1), (1, 0), (0, 1), (-1,-1), (1, -1), (-1, 1), (1, 1)]
poslist = []
for offset in offsets:
pos = getNewPosition(map, location, offset)
if pos is not None:
poslist.append(pos)
return poslist
# imporve the heuristic distance more precisely in future
def calHeuristic(pos, dest):
return abs(dest.x - pos[0]) + abs(dest.y - pos[1])
def getMoveCost(location, pos):
if location.x != pos[0] and location.y != pos[1]:
return 1.4
else:
return 1
# check if the position is in list
def isInList(list, pos):
if pos in list:
return list[pos]
return None
# add available adjacent positions
def addAdjacentPositions(map, location, dest, openlist, closedlist):
poslist = getPositions(map, location)
for pos in poslist:
# if position is already in closedlist, do nothing
if isInList(closedlist, pos) is None:
findEntry = isInList(openlist, pos)
h_cost = calHeuristic(pos, dest)
g_cost = location.g_cost + getMoveCost(location, pos)
if findEntry is None :
# if position is not in openlist, add it to openlist
openlist[pos] = SearchEntry(pos[0], pos[1], g_cost, g_cost+h_cost, location)
elif findEntry.g_cost > g_cost:
# if position is in openlist and cost is larger than current one,
# then update cost and previous position
findEntry.g_cost = g_cost
findEntry.f_cost = g_cost + h_cost
findEntry.pre_entry = location
# find a least cost position in openlist, return None if openlist is empty
def getFastPosition(openlist):
fast = None
for entry in openlist.values():
if fast is None:
fast = entry
elif fast.f_cost > entry.f_cost:
fast = entry
return fast
openlist = {}
closedlist = {}
location = SearchEntry(source[0], source[1], 0.0)
dest = SearchEntry(dest[0], dest[1], 0.0)
openlist[source] = location
while True:
location = getFastPosition(openlist)
if location is None:
# not found valid path
print("can't find valid path")
break;
if location.x == dest.x and location.y == dest.y:
break
closedlist[location.getPos()] = location
openlist.pop(location.getPos())
addAdjacentPositions(map, location, dest, openlist, closedlist)
#mark the found path at the map
while location is not None:
map.map[location.y][location.x] = 2
location = location.pre_entry
WIDTH = 10
HEIGHT = 10
BLOCK_NUM = 15
map = Map(WIDTH, HEIGHT)
map.createBlock(BLOCK_NUM)
map.showMap()
source = map.generatePos((0,WIDTH//3),(0,HEIGHT//3))
dest = map.generatePos((WIDTH//2,WIDTH-1),(HEIGHT//2,HEIGHT-1))
print("source:", source)
print("dest:", dest)
AStarSearch(map, source, dest)
map.showMap()
到此這篇關于python實現A*尋路算法的文章就介紹到這了,更多相關python A*尋路算法內容請搜索腳本之家以前的文章或繼續瀏覽下面的相關文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- Python3 A*尋路算法實現方式
- python實現Dijkstra靜態尋路算法
- python 實現A*算法的示例代碼