概念
Protobuf(Google Protocol Buffers)是google開(kāi)發(fā)的的一套用于數(shù)據(jù)存儲(chǔ),網(wǎng)絡(luò)通信時(shí)用于協(xié)議編解碼的工具庫(kù).它和XML和Json數(shù)據(jù)差不多,把數(shù)據(jù)已某種形式保存起來(lái).Protobuf相對(duì)與XML和Json的不同之處,它是一種二進(jìn)制的數(shù)據(jù)格式,具有更高的傳輸,打包和解包效率
優(yōu)點(diǎn):
1:序列化后體積相比Json和XML很小,適合網(wǎng)絡(luò)傳輸
2:支持跨平臺(tái)多語(yǔ)言
3:消息格式升級(jí)和兼容性還不錯(cuò)
4:序列化反序列化速度很快,快于Json的處理速度
缺點(diǎn):
1、以二進(jìn)制的方式存儲(chǔ),除非你有 .proto 定義,否則你沒(méi)法直接讀出 Protobuf 的任何內(nèi)容。
2、功能簡(jiǎn)單,無(wú)法用來(lái)表示復(fù)雜的概念。
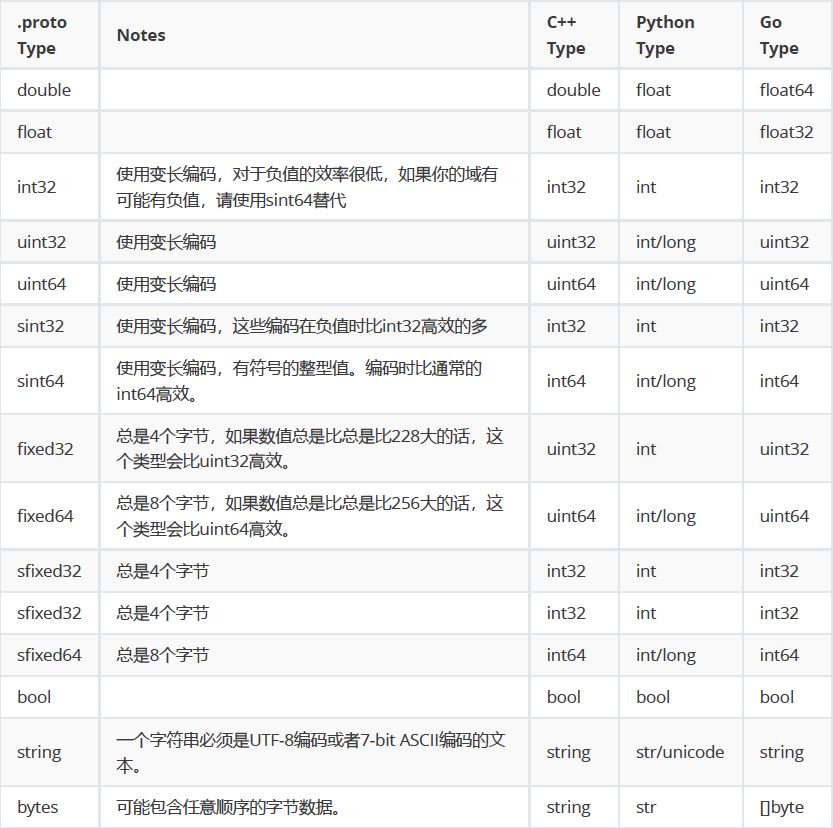
標(biāo)準(zhǔn)數(shù)據(jù)類型
一個(gè)標(biāo)量消息字段可以含有一個(gè)如下的類型——該表格展示了定義于.proto文件中的類型,以及與之對(duì)應(yīng)的、在自動(dòng)生成的訪問(wèn)類中定義的類型
基于序號(hào)的協(xié)議字段映射(類似key-value結(jié)構(gòu))
新建 test.proto
在消息中承載的數(shù)據(jù)分別對(duì)應(yīng)于每一個(gè)字段都有一個(gè)名字和一種類型。
syntax = "proto3";
package WeightEstimationUpdate;
option java_package = "com.muyuan.platform.bar.patrol.pro";
// 請(qǐng)求包基類(沒(méi)有附加數(shù)據(jù),通信包不重新定義直接使用基類包)
message BaseRequestCommon
{
string DeviceId = 1; // 設(shè)備編號(hào)
string MsgID = 2; // 消息ID,用UUID
string Timestamp = 3; // unix時(shí)間戳(秒)
uint32 Cmd = 4; // 指令信息
bytes payLoad = 5; // 消息體
}
// 上報(bào)
message DeviceRegist
{
string version = 1; //
string macAddr = 2; //
}
// 下發(fā)
message PushUpgradeInfo
{
string version = 1; // 版本號(hào)
string packageName = 2; //
string packageMd5 = 3; //
string packageUrl = 4; //
}
// 上報(bào)
message ReportWeightEstimationStatus
{
string version = 1; //
string state = 2; //
}
// 指令列表
enum EmCmd
{
CMD_NONE = 0x0000; // 指令開(kāi)始范圍
//-----------------服務(wù)器端主動(dòng)下發(fā)到設(shè)備端信令定義開(kāi)始------------------
CMD_S2C_PUSH_UPGRADE_INFO = 0x0013; // 下發(fā)(協(xié)議包:PushUpgradeInfo)
//-----------------服務(wù)器端主動(dòng)下發(fā)到設(shè)備端信令定義結(jié)束-----------------
//-----------------設(shè)備端主動(dòng)上報(bào)到服務(wù)端信令定義開(kāi)始-------------------
CMD_C2S_REPORT_REGIST = 0x0060; // 注冊(cè)(協(xié)議包:WeightEstimationRegist)
CMD_C2S_REPORT_FAULT = 0x0061; // 上報(bào)故障(協(xié)議包:ReportFault)
CMD_C2S_REPORT_WEIGHT_ESTIMATION_STATUS = 0x0063; // 上報(bào)狀態(tài)信息(協(xié)議包:WeightEstimationStatus)
//-----------------設(shè)備端主動(dòng)上報(bào)到服務(wù)端信令定義結(jié)束-----------------
CMD_END = 0xFFFF; // 指令結(jié)束范圍
}
情況1: 收到通信信息
import test_pb2 as weight_pd
base_request_common_obj = weight_pd.BaseRequestCommon()
base_request_common_obj.ParseFromString(msg)
payload = base_request_common_obj.payLoad
push_upgrade_info_obj = weight_pd.PushUpgradeInfo()
push_upgrade_info_obj.ParseFromString(payload)
update_version = push_upgrade_info_obj.version
update_zip_filename = push_upgrade_info_obj.packageName
# 反向解析即可
情況2:發(fā)送通信信息
import test_pb2 as weight_pd
base_request_common = weight_pd.BaseRequestCommon()
base_request_common.DeviceId = deviceId
base_request_common.MsgID = str(uuid.uuid4())
base_request_common.Timestamp = str(int(time.time()))
# change
item_list = weight_pd.EmCmd.items()
#此為 protobuf 3.0.0 版本的
weight_dict = listtuple_dict(item_list)
base_request_common.Cmd = weight_dict.get("CMD_C2S_REPORT_WEIGHT_ESTIMATION_STATUS")
#此為 protobuf 最新版本
# base_request_common.Cmd = weight_pd.EmCmd.CMD_C2S_REPORT_WEIGHT_ESTIMATION_STATUS
report_weight_estimation_status = weight_pd.ReportWeightEstimationStatus()
report_weight_estimation_status.version = self.version
report_weight_estimation_status.state = state
base_request_common.payLoad = report_weight_estimation_status.SerializeToString()
serializeToString = base_request_common.SerializeToString()
# serializeToString 即為 二進(jìn)制數(shù)據(jù)流
def listtuple_dict(item_list):
weight_cmd_dict = {}
for k, v in item_list:
weight_cmd_dict.setdefault(k, v)
return weight_cmd_dict```
到此這篇關(guān)于python使用protobuf的文章就介紹到這了,更多相關(guān)python使用protobuf內(nèi)容請(qǐng)搜索腳本之家以前的文章或繼續(xù)瀏覽下面的相關(guān)文章希望大家以后多多支持腳本之家!
您可能感興趣的文章:- java程序中protobuf的基本用法示例
- 淺談序列化之protobuf與avro對(duì)比(Java)
- 基于Protobuf動(dòng)態(tài)解析在Java中的應(yīng)用 包含例子程序
- protobuf c++編程筆記
- SpringBoot使用protobuf格式的接口方式
- Netty結(jié)合Protobuf進(jìn)行編解碼的方法
- Python使用protobuf序列化和反序列化的實(shí)現(xiàn)
- Protobuf在Cmake中的正確使用方法詳解
- C#語(yǔ)言使用gRPC、protobuf(Google Protocol Buffers)實(shí)現(xiàn)文件傳輸功能
- 在java程序中使用protobuf